Aufbau-Richtlinien KAFO
Ein richtiger Aufbau ist entscheidend für eine funktionelle Orthese. Damit der Patient in allen Gangphasen sicher laufen kann, muss schon bei der Planung der Orthese bedacht werden, wie sich verschiedene Konstruktionsmerkmale auf den Gesamtaufbau der Orthese und damit auf den Patienten auswirken.
Dieses Online-Tutorial betrachtet den Aufbau und die Wirkung verschiedener Einstellungen einer KAFO (Knee Ankle Foot Orthosis; Ganzbeinorthese) in den unterschiedlichen Gangphasen.
-
Aufbau der Orthese
-
Schritt 1/2

Schritt 2/2


-
Fußteil der Orthese – Dorsalanschlag
-
Schritt 1/13

Schritt 2/13

Schritt 3/13

Schritt 4/13

Schritt 5/13

Schritt 6/13

Schritt 7/13

Schritt 8/13

Schritt 9/13

Schritt 10/13

Schritt 11/13

Schritt 12/13

Schritt 13/13














-
Fußteil der Orthese – Spitzenhub
-
Schritt 1/4

Schritt 2/4

Schritt 3/4

Schritt 4/4





-
Fußteil der Orthese – Vorfuß
-
Schritt 1/3

Schritt 2/3

Schritt 3/3




-
Fußteil der Orthese – Abrollbereich
-
Schritt 1/4

Schritt 2/4

Schritt 3/4

Schritt 4/4





-
Fuß – Fersenkipphebel
-
Schritt 1/6

Schritt 2/6

Schritt 3/6

Schritt 4/6

Schritt 5/6

Schritt 6/6







-
Knöchel – Plantaranschlag/Plantarflexionsbegrenzung
-
Schritt 1/22

Schritt 2/22

Schritt 3/22

Schritt 4/22

Schritt 5/22

Schritt 6/22

Schritt 7/22

Schritt 8/22

Schritt 9/22

Schritt 10/22

Schritt 11/22

Schritt 12/22

Schritt 13/22

Schritt 14/22

Schritt 15/22

Schritt 16/22

Schritt 17/22

Schritt 18/22

Schritt 19/22

Schritt 20/22

Schritt 21/22

Schritt 22/22























-
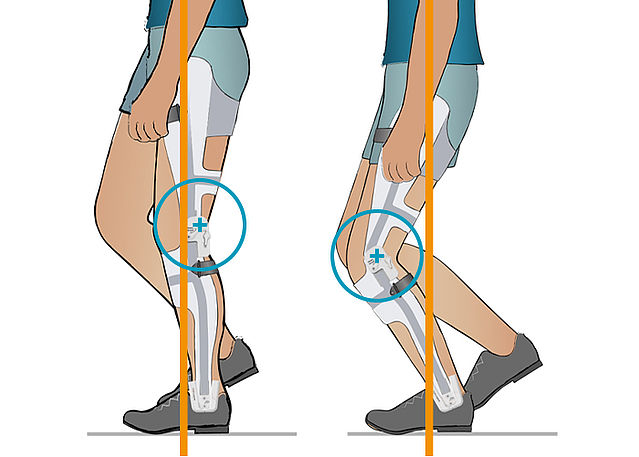
Knie - Extensionsanschlag
-
Schritt 1/6

Schritt 2/6

Schritt 3/6

Schritt 4/6

Schritt 5/6

Schritt 6/6







-
Knie – Flexionsanschlag/Flexionsbegrenzung
-
Schritt 1/11

Schritt 2/11

Schritt 3/11

Schritt 4/11

Schritt 5/11

Schritt 6/11

Schritt 7/11

Schritt 8/11

Schritt 9/11

Schritt 10/11

Schritt 11/11












Letzte Aktualisierung: 07.10.2022